1.l298n应该怎么接线?
2.树莓派 3 + L298N模块 驱动直流电机
3.怎样通过arduino驱动直流电机?急求!
4.这个是单片机学习板连接L298N电机驱动模块得照片看看对不,电机要吗没有反应要不就只能转一个,
L298N实物接线图使能端接单片机如图。
先VMS驱动部分取电可接外接电源,一般是12V左右比较合适,逻辑部分可板内取电,即端子可悬空,也可接入+5V-+7V。端子左右两排三个插针分别用来控制两路直流电机。
EA、EB接ArduinoPWM接口用于电机调速,I1、I2、I3、I4接口,分别用来控制两路直流电机前进、后退、转向以及刹车,只需接入Arduino的数字接口即可。
白色开关是5V电源开关。L298有两个电源,一个是用于驱动电机的Vs(最高可达46V),另一个是逻辑驱动电源Vcc只要5V。板子上面只带了一个5V的稳压芯片,这个芯片在供电电压Vs大于8V的时即可正常工作,即把Vs转化成Vcc,用12V供电的时候只要一个电源就够了。
扩展资料:
特点单片机的特点:集成度高;存储容量大;外部扩展能力强;控制功能强。
1、从内部的硬件到软件有一套完整的按位操作系统,称作位处理器,处理对象不是字或字节而是位。不但能对片内某些特殊功能寄存器的某位进行处理,如传送、置位、清零、测试等,还能进行位的逻辑运算,其功能十分完备,使用起来得心应手。
2、同时在片内RAM区间还特别开辟了一个双重功能的地址区间,使用极为灵活,这一功能无疑给使用者提供了极大的方便。
3、乘法和除法指令,这给编程也带来了便利。很多的八位单片机都不具备乘法功能,作乘法时还得编上一段子程序调用,十分不便。
百度百科--驱动模块
百度百科--单片机
l298n应该怎么接线?
注意:电机的电源从4脚接入。9脚仅是芯片的控制电源。1脚15脚接地。5脚7脚是电机1的控制端6脚是电机1的使能控制端。11脚是电机2的使能控制,10脚12脚是电机2的控制端8脚是芯片接地端。2脚3脚接电机1,13脚14脚接电机2.
上面指出的控制端连接地电位或者5V的电压去试验你所需的转速,和方向,在控制端输入脉宽信号可以调节速度。
供参考
树莓派 3 + L298N模块 驱动直流电机
电源使用的是两节18650电池串联,满电电压8V左右,然后使用lm2940稳压芯片转成5V,5V电压用来给单片机供电,8V电压用来给电机供电。
Ps:也可以分别使用一个5V电源和一个5-12V的电源给单片机和L298N供电。
单片机我使用的是P2^0 P2^1,这两个口接L298N的输入口1和2,输出口1 2接电机的两极。并接好电源,记住L298N和单片机必须接同一个GND,L298N和单片机必须接同一个GND,L298N和单片机必须接同一个GND,否则电机不转或者会抖动,这点很重要。
接下来写程序让他动起来,P2^0和P2^1口分别给不同的电平,电机即可转起来。
扩展资料有两种方法改变转向:
1、 改变电气连接:简单点就是把电机两极接线互换,即可改变转向。
2、 程序改变转向:即把两个口的高低电平互换即可(顺时针还是逆时针为正转完全取决于自己的想法)
L298N虽然是两路输出,但不一定最多只接两个电机,完全可以接四个,只不过要两个两个并联而已,一个小车可以只使用一个L298N,一路控制一侧的电机。做循迹小车、灭火小车等等。可以使用PWM控制电机转速。
怎样通过arduino驱动直流电机?急求!
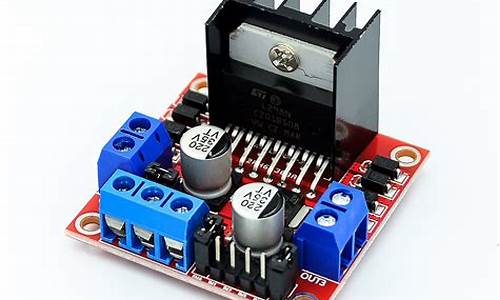
单片机或树莓派一般使用 L298n 模块来驱动电机 。L298N的实物图如下。
12V power:L298n 的电源正极,尽管标的 12V,但你可以使用 7V ~ 35V 的电源。
GND:? L298n 的电源地,树莓派的 GND 引脚也要接到这里,即 L298N 和 树莓派需要共地。
5V power:? L298n 输出的 5v 电源,是用来给单片机或树莓派供电的。如果你的树莓派是单独供电,那么这个引脚悬空。
Output 的两个引脚接直流电机的两脚,而板上有 Output A 和 Output B,分别驱动电机 A 和电机 B。
A Enable : ?电机 A 使能,接 GPIO 口 。可以用PWM 来调速。
Logic Input : ?接 4 个 GPIO 口。 上面两个脚 Input1 、Input2 (靠近 A Enable )控制电机 A ; 下面两个脚 Input3、Input4 (靠近 B Enable)控制电机 B。
B Enable : 电机 B 使能,接 GPIO 口。 可以用 PWM 来调速。
总结一下就是 A Enable 、Input1、Input2 控制电机 A 的运行,B Enable、Input3、Input4 控制电机 B 的运行。
如何控制的呢? 下面是对电机 A 进行控制的真值表,电机 B 同理。
驱动一下试试吧!
下面是控制电机 A 的电路图:
把 L289N 的直流电源接好,然后把树莓派的 GND 与 L298N 的 GND 连在一起,因为共地后 L298N 才能识别树莓派发送的 IN1、IN2 到底是高电平还是低电平。 ?
树莓派的 2、3、4 脚分别连到 A Enable、IN1 、IN2 。(把 Enable 上的短接帽拿掉)
由控制表可知给 2 脚高电平,3 脚高电平,4 脚低电平,电机就会正转。
编写程序:
前面提到过 A Enable 和 B Enable 可以用 pwm 控制来调速,下面是相应程序。
接线不变!这个程序可以让电机 A 以不同的速度正转。
在树莓派中运行程序后,可以看到电机的转速会随着占空比的改变而变化。
程序源码在:? github
这个是单片机学习板连接L298N电机驱动模块得照片看看对不,电机要吗没有反应要不就只能转一个,
用298驱动模块。
Arduino uno + L298N 驱动模块接线
把程序上传到主板上,接上外部电源,电机就转起来了.
这里选用IO口为5,6,9,10,这四个均支持PWM,可以通过占空比代码实现控制转动速度的快慢.
可以按下这个按钮复制代码
是看不到啊。原因有几个
1.电压不足,要保证电压7V以上才可以。
2.程序不对,举例子,给ENA接+5,IN1接GND,IN2接+5V。你看看电机1转不转,同理,另一个也这么实验,如果转了就是单片机程序或者那个地方电路问题。再有别用P0,需要上拉。换P1